
Robotics, Brain and Cognition Laboratory
The Robotics, Brain, and Cognition Laboratory (RBCog-Lab) is a concentrated research infrastructure in the area of cognitive robotics. The core of the infrastructure consists of robotic platforms (hardware, software, and support crew) which includes one iCub robot, the most sophisticated humanoid robot in the world in terms of degrees of freedom. The ISR/IST host group is one of the developers of the original platform and hosts the only such robot existing in Portugal. RBCog-Lab includes additional robots (e.g. Vizzy, Baxter, Kinova Gen3, Temi) and equipment such as motion capture systems and gaze trackers. The project was founded on a neuroscientific basis, keeping a strong link with this community during past and ongoing research projects. This project is part of the Portuguese roadmap of Research Infrastructures.
Other recipients of our infrastructure come from a variety of fields such as robotics, engineering, developmental psychology, rehabilitation, education, and more.
The robots
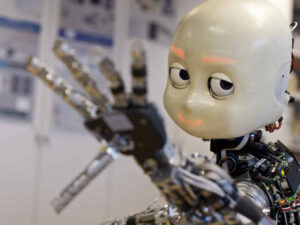
We have participated in the development of the iCub robotic platform and we host the only instance of the iCub in Portugal. The iCub is an advanced humanoid robot equipped with 53 motors moving the head, arms, hands, waist, and legs. It includes cameras with human-like movement performance, stereo hearing capabilities, tactile and proprioceptive sensors. The iCub was designed to mimic a 3-year-old child. Its anthropomorphism is noticeable in its complex hands, facial expressions, and realistic movements of its waist, arms, and eyes. In addition to a full-body iCub, we also have two iCub heads mounted on fixed torsos (Chico and Chica).
Finally, the laboratory hosts a wheeled robotic platform (Vizzy) capable of tether-free movements, based on the same software platform as the iCub. Other robotic platforms include Baxter, Kinova Gen3 and Temi.




Chica & Chico
- Chico and Chica were the first prototypes for the head of the iCub, being Chica its first version. The head was extensively used in gaze-based interactions with children. It was also used on research related to eye and sensory movements of the iCub. Chico and Chica were designed to always be three years old, with physical characteristics similar to a human child. They came into the world to help us understand how the human brain works, and how children develop.

iCub
- iCub is a research-grade humanoid robot designed to help developing and testing embodied AI algorithms. iCub is the ideal companion to your robotics laboratory. The iCub Project blends results from the RobotCub project, where we contributed on the head design. It is one of the most complex humanoid robots in the world, being able to learn like children, walk, interact with humans in a natural way.
Vizzy
- Vizzy is the main social robot of the RbCog-Lab infrastructre. Its design guidelines combine the friendly and organic approach with the functionality. The main strategic design decision was the adoption of an upper humanoid-like torso and a wheeled platform for locomotion, which is the main constraint in the appearance.
- The facial expresions and hand design of Vizzy was influenced by two robots: iCub on the facial expressions and Baltazar on the hand design.

Baxter
- Baxter is a 1 meter tall robot (reaches 2m with pedestal), with two arms and an animated face. It weighs 75 kg without the pedestal and 140kg with the pedestal. It is used for simple industrial tasks such as loading, unloading, sorting and material handling. Brooks claimed Baxter was designed to perform tedious tasks on a production line. It is intended to be sold to small and medium businesses.

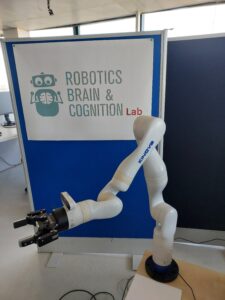
Kinova Gen3 (Kortex)
- Kinova is a high precision ultra-lightweight robotic arm of 7DOF, with 1 kHz closed-loop control at low level, infinite rotation on all joints, smart actuators with integrated torque sensors, and 2D/3D vision module. Its modular design allows to mount the robot easily on a tabletop environment and configure several end-effectors. Currently we are able to configure: (1) Robotiq 2 finger gripper, (2) Qb research humanoid hand, and (3) Seed Robotics humanoid hand with tactile sensing.
Temi Robot
- Temi is a mobile robot for telepresence applications. The remote interface allows a person to move freely in an environment, substituting the own person physical presence in social events, as well as visits in a hospital or elderly care facility. It is able to follow persons using its camera.

Other equipment
The RBCog-Lab infrastructure features cutting-edge research tools to support 3D vision, video surveillance, robot calibration, navigation and manipulation, cognitive systems, and bio-inspired humanoid robots, including:
Eye Tracking System (Tobii)

Tobii is a tracking device built into a monitor. It has many applications and is extremely useful for many tests related to human vision.
Motion/gaze capture system (Optitrack)


Optitrack consists of an infrared camera system that is commonly used to capture motion. But its capabilities are not limited to this, it can be used in conjunction with computer vision and object tracking… having a multitude of possible uses in studies for physical and virtual environments.
Inertial Measurement Units (Xsens, LP Research)

LPMS inertial measurement units are capable of fast and accurate 3D orientation sensing. We support a variety of communication interfaces and enclosure options.
3D sensors (Microsoft Kinect v1 and v2, Asus Xtion, Orbbec Astra, SoftKinetic DepthSense)


3D Sensors from Microsoft, Asus and Softkinetic. With several options for angle, sensitivity and resolution.
Cameras (Point Grey Research)


Compact cameras for various uses and setups.
Dexterous humanoid hands


VR Headset (Oculus Rift, HTC Vive)

VR headset with its appropriate accessories, for research in a virtual environment with greater immersion and use of precise sensors
Research projects
The robotic platforms of RBCog-Lab are used in several projects. In particular, due to the versatility and characteristics of the iCub, this robot was used to simulate human grasping, object interaction and manipulation in the real world (EU Projects First-MM, Handle), to study the way humans perceive the world (EU Project RoboSoM) and how they use natural language and visual action recognition as a learning mechanism to generate new behaviours and experiences (EU-Project POETICON++). The Kinova robot has been used to develop methods for manipulation of fresco fragments (EU FET Open RePair). The Baxter robot is being used in grocery packing applications (FCT project AI-Packbot). Vizzy has been used in improving the quality of life of the elderly (CMU-Portugal AHA project). Temi has been used in telepresence and social interaction in clinical environments (FCT project HAVATAR). For further information, please refer to our projects page.
Management
The infrastructure is currently under the responsibility of the laboratory director (José Santos-Victor) and the permanent staff (Alexandre Bernardino ,José Gaspar and Plinio Moreno), who decide the relevant issues regarding the platforms, such as maintenance, upgrades and main research directions.
An engineering staff guarantees platform availability and conducts all necessary maintenance.



Access
Our research group, together with our partners, is the main user of the infrastructure. These robots are sometimes used for showcasing and other events for the general public, but these possibilities are always considered under a cost/benefit analysis taking into account ongoing research constraints and deadlines at the time.
Access to the RBCog-Lab infrastructure is possible, pending
- A concrete experiment has been devised and implemented on the publicly available iCub Simulator (www.icub.org).
- The request is approved by the management staff. This will take into account the risk involved, possible lab resources that must be committed, the scientific merit of the proposal and the availability of the platform itself at the time.
This strict policy is required due to the non-trivial hardware involved which is able to self-destruct due to misuse. To minimize the consequences of a possible rejection, we recommend that you contact us first to obtain a pre-approval based on your proposal, but only projects implemented on the simulator which can be demonstrated to perform correctly will be granted access.
National RBCog-Lab network
A number of of well-known Portuguese research centres, active in the areas served by RBCog-Lab, have demonstrated interest in an active exploration of the RBCog-Lab as a research tool. This group of users will be managed in a dynamic manner and new members will be accepted once the access to the infrastructure is fully operational. The national institutional network is currently comprised of
- Institute for Systems and Robotics, Instituto Superior Técnico (ISR/IST), Universidade de Lisboa (host)
- Universidade de Coimbra, Institute for Systems and Robotics (Jorge Dias, Helder Araújo)
- Champalimaud Foundation (Zach Mainen, Adam Kampff, Rui Costa)
- Universidade de Aveiro (Luís Seabra Lopes, Victor Santos)
- Madeira Interactive Technologies Institute (Nuno Nunes, Sergi Bermúdez i Badia)
- Instituto de Medicina Molecular IMM (Tiago Maia, Leonel Luís)
- Faculdade de Engenharia, Universidade do Porto (A. Pedro Aguiar)
- Universidade do Minho (Estela Bicho, Wolfram Erlhagen)
International collaboration
Access to the RBCog-Lab infrastructure opens a door to collaborate with the whole cognitive robotics community, in particular with other institutions hosting similar platforms. The scientific goals proposed by IST are fully aligned with the future developments of the iCub platform and research community, namely with the Italian Institute of Technology (Professors Giulio Sandini, Giorgio Metta and Luciano Fadiga), the lead iCub Consortium partner. More info at www.icub.org.

RBCog-Lab has been selected to integrate the Portuguese roadmap of Research Infrastructures and is supported by the Fundação para a Ciência e a Tecnologia.